OTT-JAKOB Spanntechnik GmbH Мировой лидер в области производства автоматического зажимного инструмента
Фактически единственный производитель, который предлагает полный выбор автоматический зажимных систем различных типов.
Фирма OTT JAKOB состоит в группе JAKOB и занимается производством и разработкой автоматических зажимов и приспособлений для различного промышленного оборудования и станков. Более 255000 машин во всех странах мира оснащены зажимными устройствами фирмы OTT JAKOB.
OTT-JAKOB предлагает своим клиентам полный спектр модульного автоматического зажимного инструмента для всех областей и для всех целей. Традиционные ценности, такие как стремление к совершенству и точности, в сочетании с высокой инновационной технологией. Изобретения и патенты во всех областях. Как глобальная компания OTT-JAKOB имеет глобальное присутствие в разных странах мира .
Компания OTT-JAKOB: Лидер в Производстве Автоматических Зажимов
Фирма OTT-JAKOB, входящая в группу JAKOB, специализируется на разработке и производстве автоматических зажимов и приспособлений для различного промышленного оборудования и станков. Более 255,000 машин по всему миру используют зажимные устройства от OTT-JAKOB, что подтверждает высокий уровень доверия к нашей продукции.
Модульные Автоматические Зажимные Инструменты
Компания OTT-JAKOB предлагает широкий ассортимент модульных автоматических зажимных инструментов, подходящих для различных областей применения. Мы сочетаем традиционные ценности, такие как стремление к совершенству и точности, с передовыми инновациями и современными технологиями. Наша команда постоянно работает над новыми изобретениями и патентами, укрепляя наши позиции на рынке.
Принципы Работы OTT-JAKOB
В последние годы OTT-JAKOB заняла лидирующие позиции в области зажимной технологии. Мы придерживаемся следующих ключевых принципов:
Профессиональная команда: В компании работает высококвалифицированный и мотивированный персонал, нацеленный на создание высокотехнологичных продуктов. Командный дух и инновационное мышление являются основой для разработки высокоэффективных зажимов и технологических решений в машиностроении.
Оптимизация безопасности: Все продукты OTT-JAKOB обеспечивают высокий уровень безопасности и соответствуют современным требованиям технологического развития.
Инновационный Потенциал и Опыт
Сотрудники OTT-JAKOB обладают многолетним опытом и высоким потенциалом в области инноваций. Мы применяем сложные методы расчетов, необходимых моментов и эксплуатационных параметров при использовании высокотехнологичного производственного оборудования и CAD-систем.
Сотрудничество с Машиностроителями и Университетами
Наш многолетний опыт и активное сотрудничество с ведущими машиностроительными компаниями и производителями шпинделей, а также взаимодействие с университетами, помогают максимально повысить уровень наших услуг. OTT-JAKOB находится в тесном контакте с проектировщиками, что позволяет разрабатывать продукцию, максимально соответствующую потребностям клиентов и обеспечивать эффективность её применения.
OTT-JAKOB Spanntechnik GmbH
Industriestraße 3-7
D - 87663 Lengenwang
Сотрудники OTT-Якоба имеют многолетние знания и инновационного потенциала. Они осваивают сложную методику расчета скоростей в пограничном районе, необходимых моментов и других эксплуатационных параметров. Идеально обращение высокотехнологичного производственного оборудования и новейших связи CAD очевидна.
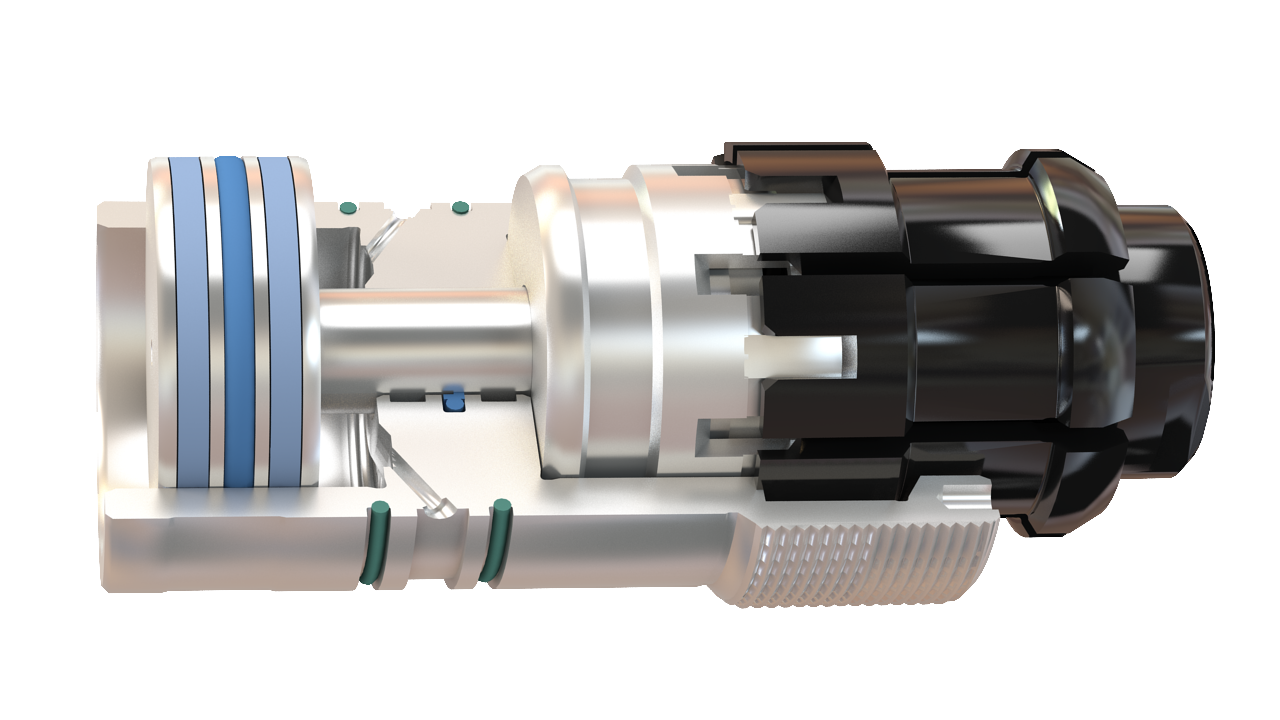
OTT-JAKOB Spanntechnik был разработан новый зажимной патрон, который имеет целый ряд преимуществ , включая зажим поддонов, заготовок, фрезерных головок и транспортных систем.
OTT-JAKOB Spanntechnik зажима патрона имеет превосходную текучесть сила, которая предлагает лучший контакт и стабильности, где это необходимо. Используя ту же технологию, что OTT-JAKOB Spanntechnik помогли разработать с системой HSK, наш новый зажима патрона используются параллельные сегменты перемещение захватывающего, которые захватывают на большем радиусе, чем наши конкуренты. Это дает отличную статическую жесткость из-за большей площади захвата.
OTT-JAKOB Spanntechnik зажима патрона использует наименьшее гидравлическое давление в своем классе и механически самоуправления замков. гидравлическое давление не требуется для поддержания его превосходное усилие зажима так долго, как это необходимо
precise-rotation.ru
Структурированный обзор системы мониторинга усилия зажима и контроля инструмента
1. Введение
Значение контроля усилия зажима в обработке деталей.
Основные причины потери заготовки или снижения качества обработки:
Человеческие ошибки при установке.
Износ системы зажима (например, гидравлические уплотнения).
Важность своевременного и точного мониторинга усилия зажима для повышения эффективности, безопасности и экономичности.
2. Цели разработки системы
Обеспечить ресурсосберегающую автоматизацию контроля усилия.
Предотвратить повреждения или срыв заготовки.
Повышение безопасности оператора.
Поддержка предиктивного обслуживания.
3. Основные компоненты системы
Модульные компоненты:
Датчик усилия.
Передняя электроника.
Блок энергонакопления.
Антенна и приемник.
3.1. Передняя электроника
Включает:
Обработчик сигнала.
Микроконтроллер с управлением питанием.
Датчик ускорения.
Датчик температуры (для компенсации).
Радио модуль для беспроводной связи.
3.2. Блоки управления
Концепции энергосбережения:
Режимы сна и активный режим.
Регулярный контроль усилия.
Быстрая реакция при превышении порога.
4. Технологии и управление энергопотреблением
Эффективное использование энергии:
Краткосрочный активация устройств.
Мониторинг в реальном времени.
Передача данных по радиоканалу.
Временные диаграммы и схемы энергопотребления.
5. Передача и обработка данных
Структура протокола:
Идентификационный номер.
Значения температуры, силы, качества сигнала.
Статистические параметры.
Передача данных:
Временные фильтры и автоматические режимы.
Реагирование на превышение порога усилия.
Постоянный и периодический контроль.
6. Дополнительные технологии
Использование керамических резонаторов для пассивных измерений.
Передача сигнала через стандартные отверстия и герметики.
Простота производства и высокая точность.
7. Примеры применения
Мониторинг усилия зажима в зоне обработки деталей.
Контроль качества инструмента.
Предотвращение загрязнений контактных поверхностей и их влияние на обработку.
Использование беспроводных сенсоров на станках и робототехнике.
8. Заключение
Внедрение систем мониторинга усилия зажима — важный шаг к автоматизации, повышению надежности и качества.
Возможности адаптации системы под конкретные задачи клиента.
Перспективы дальнейшего развития: интеграция с системами автоматического контроля и анализа данных.
Информация, представленная на сайте precise-rotation.ru, не является публичной офертой. Данный интернет-ресурс несет исключительно информационный характер и не является публичной офертой, определяемой положениями ч. 2 ст. 437 Гражданского кодекса РФ. Для получения подробной, точной информации о стоимости товара и условиях его поставки, пожалуйста, обратитесь к нам по электронной почте.
196070, г. Санкт-Петербург,: ул. Кубинская д.73 к.1б












 QR-код
QR-код